事例
エンジニア領域の様々な技術課題に
対応しています。
LiDARを用いた開発事例
導入に至ったきっかけ
LiDAR(Light Detection and Ranging)を用いたリモートセンシングにより、物体認識や自律走行ロボットの実装を検討されていました。また、異なるプロジェクトではLiDARモジュールと車載機器との通信や、自動運転技術や運転支援システムを搭載したモビリティーの開発を行いたいと考えていました。
導入前に抱えていた課題
LiDARでの開発経験が少なく、リモートセンシング、自律走行、物体認識、SLAM(Simultaneous Localization and Mapping)などの関連分野のノウハウも不足されていました。また、新規開発に充てられる開発人員が不足しているのも課題の1つでした。そこで、お客様への技術の蓄積も視野に入れ、当社にご依頼頂きました
導入後の活用例
既存車両にLiDARを搭載し、LiDARを用いたモビリティーの開発に成功しました。また、LiDARによる自己位置推定を行うSLAM技術を応用し、自律移動ロボットの実装から単体評価までを実施しました。
もたらした効果、達成した数値
LiDARでの開発経験の不足や、関連分野のノウハウの蓄積といった課題を解決でき、LiDARを用いたモビリティソリューションを提供できました。
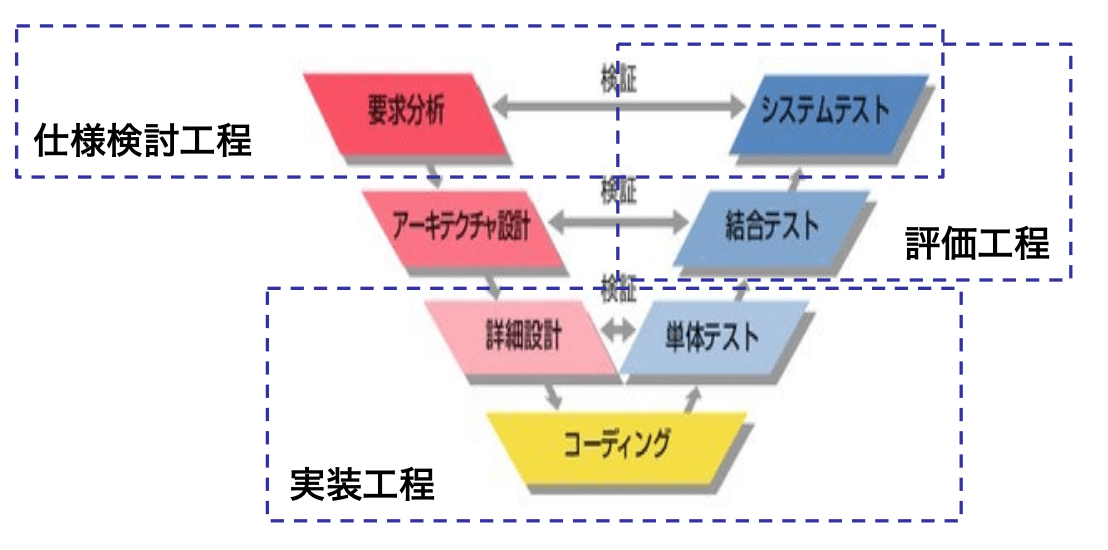
LiDARに関わるさまざまな開発工程を経験
- 仕様検討工程運転支援
システムの仕様検討や疑似環境構築を実施 - 実装工程
社内技術蓄積を目的に、3DSLAMを目指した自律移動ロボットの実装から単体評価までを実施 - 評価工程
センサによる認識結果の妥当性を評価してパラメータ調整にフィードバックするツールを作成
※それぞれ異なるプロジェクトで実施
運転支援システムの仕様検討工程
- 物体認識機能の構想検討
認識原理の考え方やアルゴリズムの仕様書への落とし込みを実施。
※数学的な知識が必要 - Ethernet通信
CANoeを用いたEthernet通信の疑似環境を構築。 - 2マイコン制御
センサによる認識結果の妥当性を評価してパラメータ調整にフィードバックするツールを作成
※それぞれ異なるプロジェクトで実施
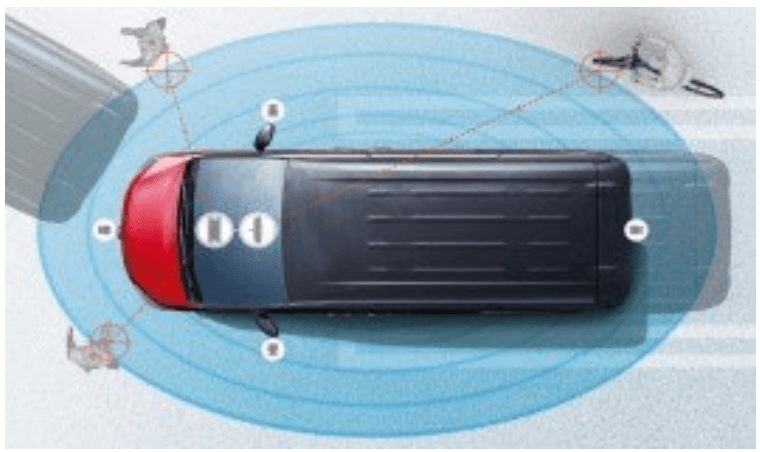
車両LiDARセンサー
自律移動ロボットの実装工程
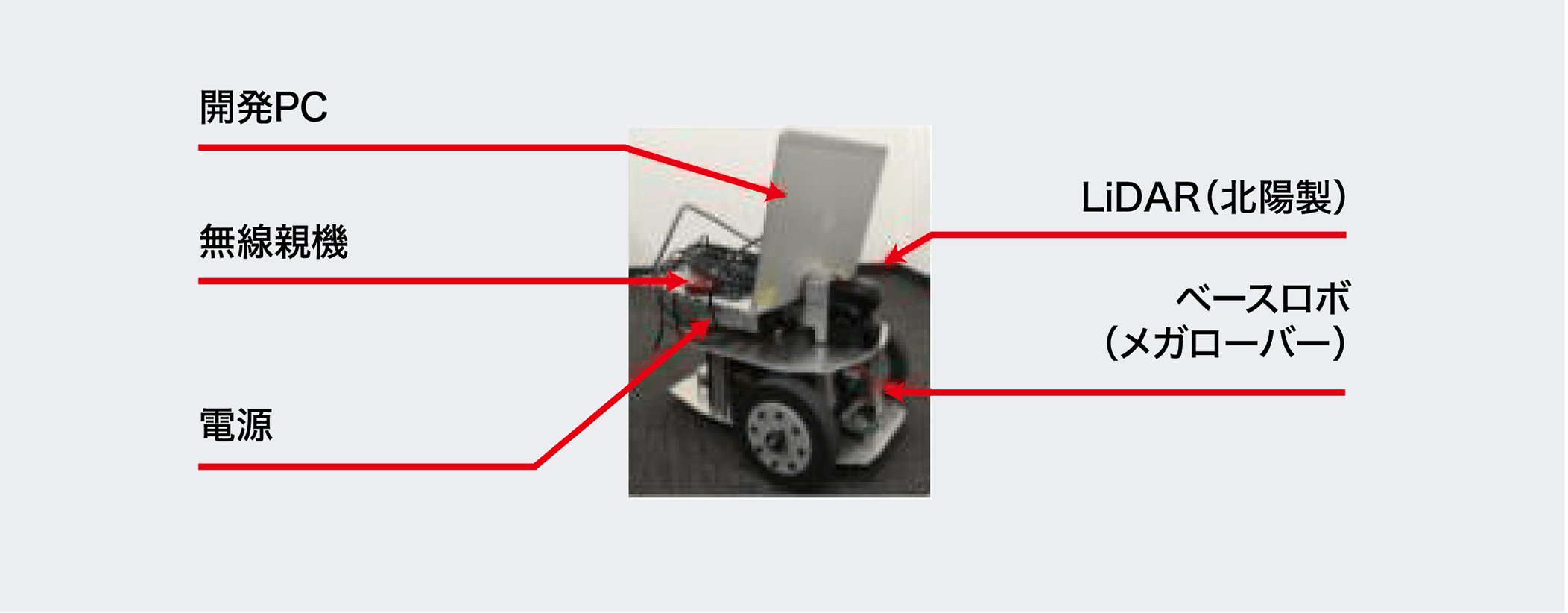
- 開発プラットフォーム構築
市販の開発ベースロボットとLiDARを調達して自律移動の開発プラットフォームとなるロボット環境を構築。
電源や無線環境、開発ノートPC等も整備。 - SLAM機能実装
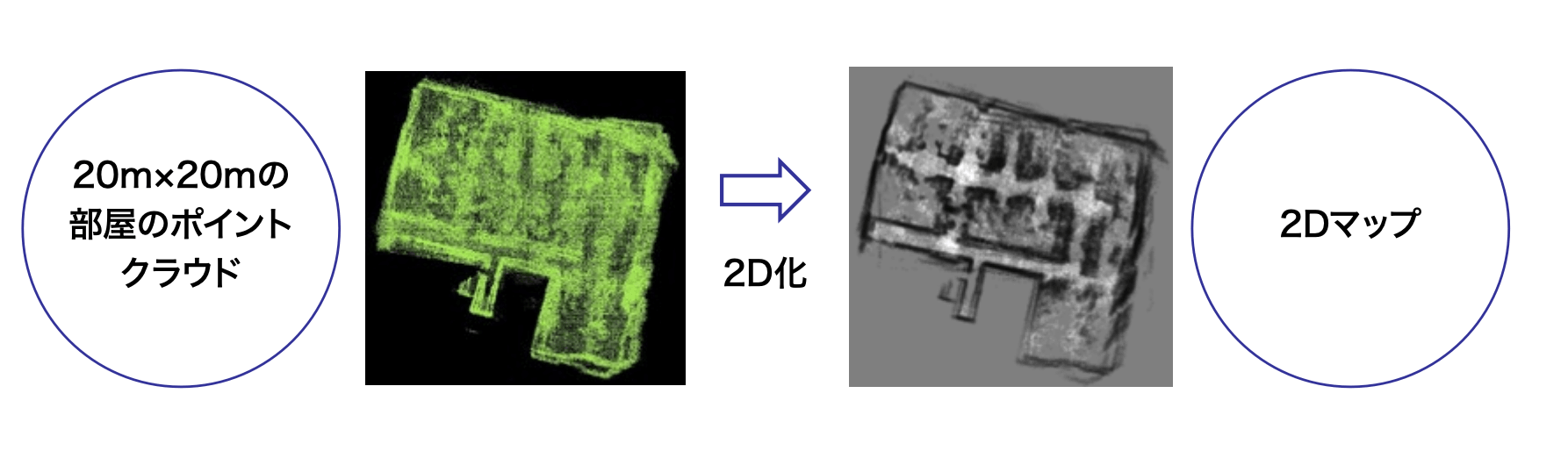
ROS環境をインストールした後、公開ライブラリであるgmappingやGoogleのcartographerを適用させてSLAM(Simultaneous Localization and Mapping)を実現。
cartographerでは3Dの環境認識ができ、自律移動も実現できている。
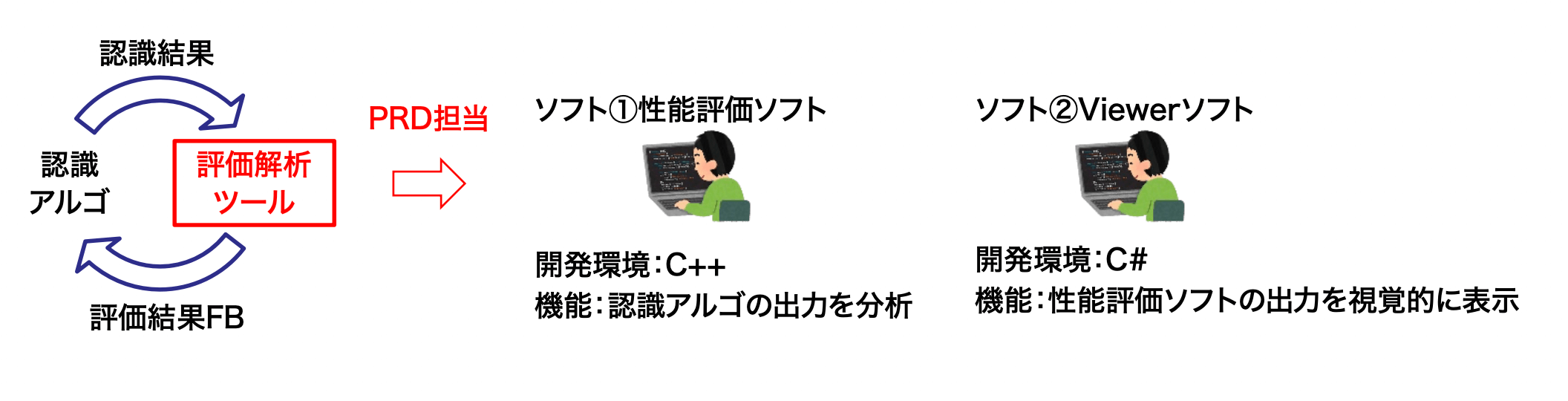
物体認識アルゴリズムの評価工程
- 認識アルゴリズム(他社開発)
LiDARのセンサデータを元に物体を検出しタグ付けされた認識結果として出力する。 - 評価解析ツール(当社開発)
認識アルゴリズムによる認識結果と正解データを紐づけして正解率を求める他、どのような物体が認識できなかったか等を出力・表示するシステムを2つのソフト構成で実現。
この記事をシェアする

