事例
エンジニア領域の様々な技術課題に
対応しています。
ロボット制御ミドルウェアROS2での開発
導入に至ったきっかけ
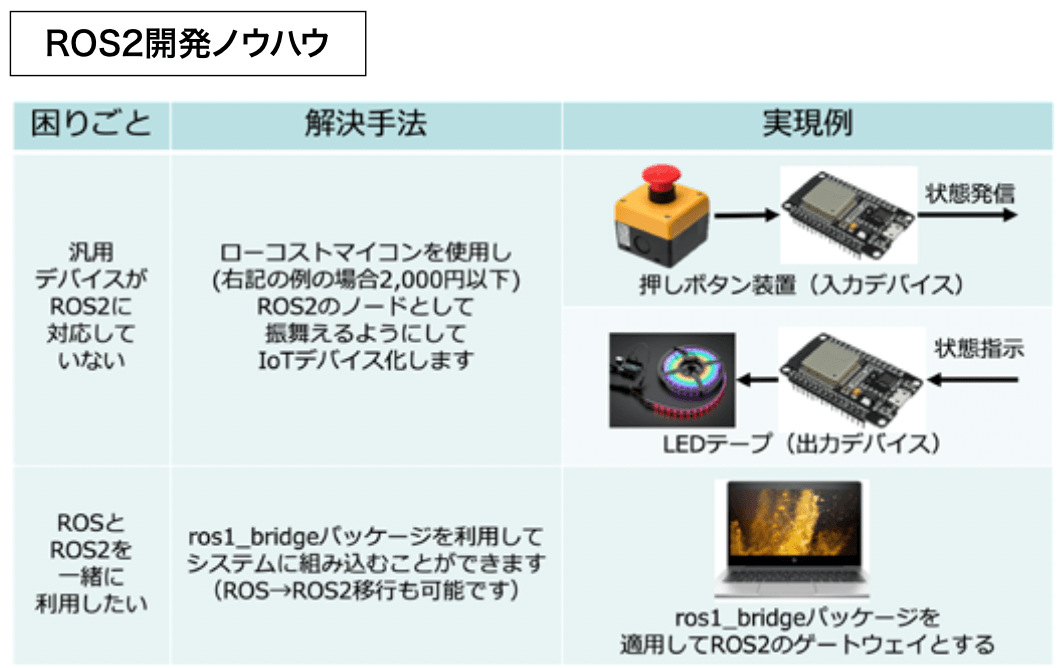
ロボット制御ミドルウェア、ROS(Robot Operating System)がROS2に移行したため、それに伴いROS2を利用した製品開発を検討されていました。しかし、まだ汎用デバイスがROS2に対応しておらず、ROS2への対応を行う必要がありました。また、ROSからROS2への移行期ということもあり、ROSとROS2を一緒に利用する手法も必要となっていました。
導入前に抱えていた課題
ROS2開発の知見が少なく、ROSとROS2を併用する形での開発ノウハウも多くありませんでした。そこで、ROSおよびROS2での開発実績がある当社へご依頼頂きました。
導入後の活用例
お客さまのご希望に添える開発提案を行い、ROS2でのロボット制御を実現したデモ製品を開発致しました。
もたらした効果、達成した数値
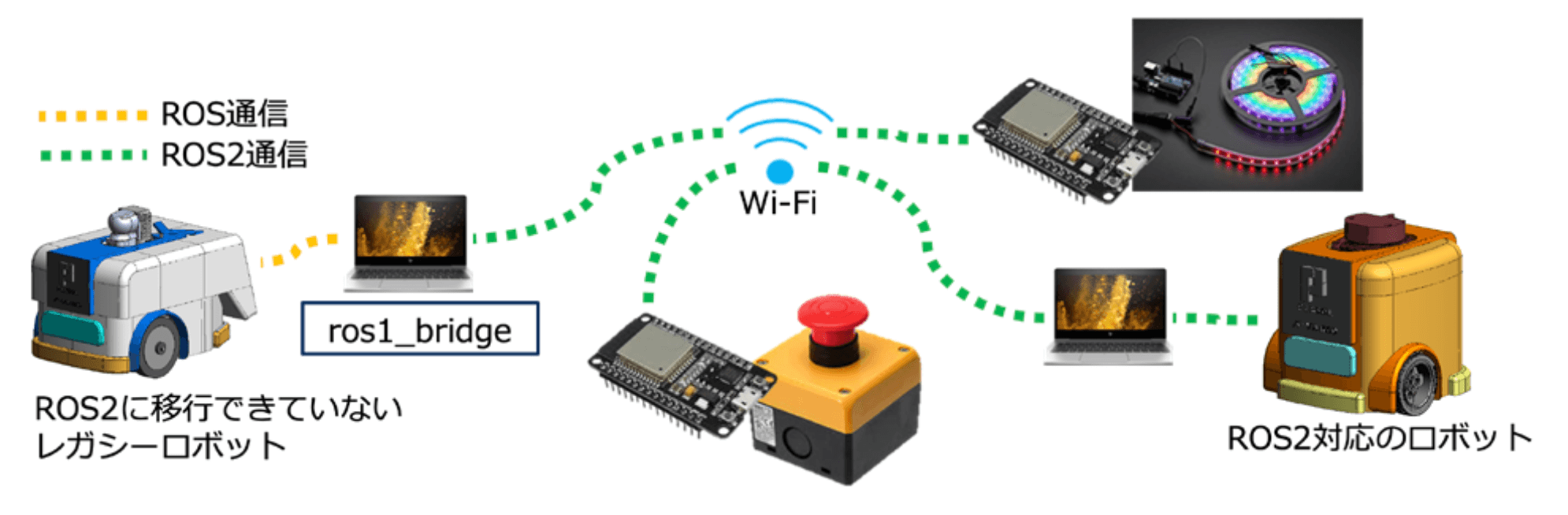
汎用デバイスがROS2に対応していないという課題は、2,000円以下のローコストなマイコンをROS2のノードとして振る舞えるようにし、IoTデバイス化することで解決しました。また、ros1_bridgeパッケージを利用することで、ROSとROS2が混在可能なプラットフォームを提案できました。ros1_bridgeパッケージの活用により、ROSからROS2への移行も進んでいます。
システム開発知見
汎用デバイスを使用したロボットの制御を実現
この記事をシェアする
関連サービス
