事例
エンジニア領域の様々な技術課題に
対応しています。
車載前方カメラでの車線や周辺車両の認識アルゴリズム開発
導入に至ったきっかけ
お客様が開発した車載前方カメラを用いて、進行方向上の車線や周辺車両の認識アルゴリズムを開発検討されていました。すでに搭載予定の認識アルゴリズムがありましたが、さらに機能追加を行い、各種認識対象の検出精度を高めるのも目的の1つでした。認識アルゴリズムの検討から評価まで、ワンストップで依頼できないかとご相談頂きました。
導入前に抱えていた課題
お客様の課題として、画像認識分野での開発人員が少なく、新規開発に人員をとられ、既存の認識アルゴリズムへの機能追加のための人員確保が困難でした。
導入後の活用例
進行方向上の車線や周辺車両の認識アルゴリズム開発
車載前方カメラの認識機能がアップし、周辺車両(並走、対向、横断)や、自車線、隣接車線、道路端境界などをより高精度に検出可能になりました。
システム概要
前方カメラの撮像画像から、各種認識対象を検出する
対象製品/機能
車線警告(LDW)、車線維持支援機能(LKA)等の走行支援、プリクラッシュブレーキ(PB)、プリクラッシュ・シートベルト(PSB)等の衝突被害低減、完全自動走行に向けた周辺環境把握
もたらした効果、達成した数値
既存の車載前方カメラの認識アルゴリズムを応用し、車線警告(LDW)や車線維持支援機能(LKA)などの車線逸脱防止支援システムや、プリクラッシュブレーキ(PB)、プリクラッシュ・シートベルト(PSB)などの衝突被害軽減システムの開発支援につながりました。また、完全自動運転の実現に向けて、車両の周辺環境把握機能を向上する技術支援にも繋がりました。
開発環境/言語
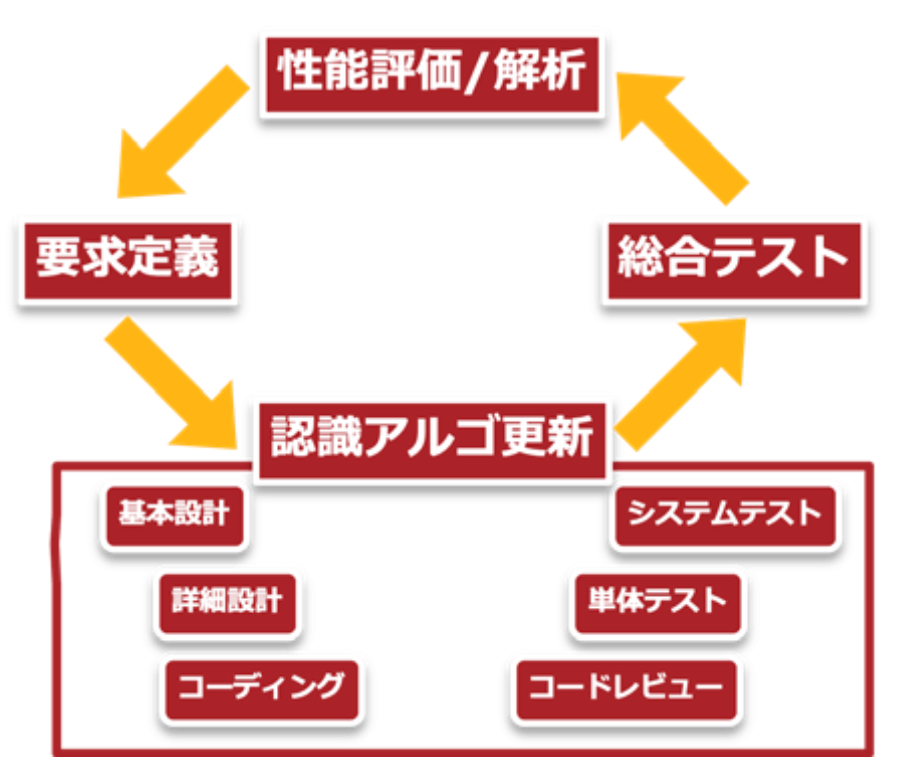
V字工程をベースに、アジャイル型の開発工程実施
開発環境/開発言語
VisualStudioを用いてC/C++開発結合テスト、評価/解析時にC#、python、VBA等で補助ツール作成/使用
この記事をシェアする