事例
エンジニア領域の様々な技術課題に
対応しています。
モビリティロボット電気システムの開発
導入に至ったきっかけ
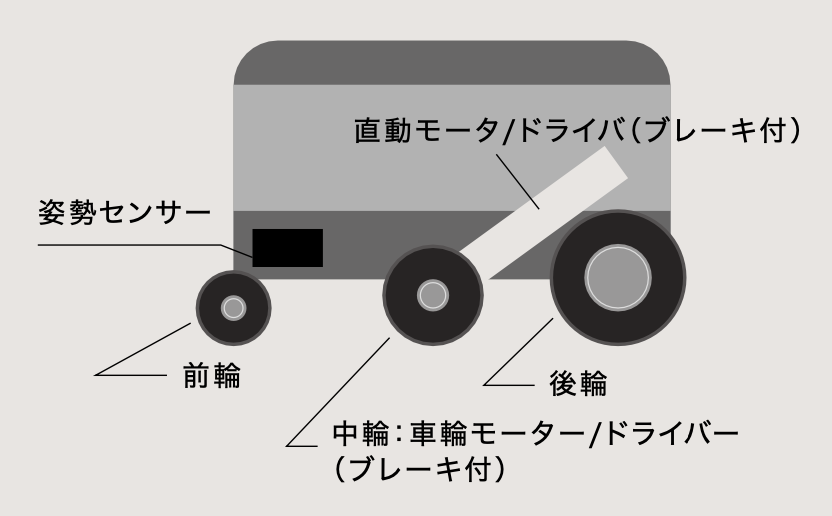
階段や傾斜路などの不整地を、車軸の可変によって走破する車両型のモビリティロボット(搬送ロボ)の開発を検討されていました。不整地走行機構として、複数のモーター、ブレーキ、クラッチを組み合わせ、センサーを用いて動的に制御する仕組みを実装する必要がありました。
搬送ロボとは
- 階段・傾斜路等不整地を車軸の可変により走破する車両型ロボ
- 複数のモータ、ブレーキ、クラッチを組み合わせセンサを用いて制御する
導入前に抱えていた課題
モビリティロボットの開発知見が少なく、基板の設計・開発から試作品の完成まで、お客さまだけで開発できるのか不安を感じておられました。そこで、制御ソフトウェア開発やUIアプリ開発などの制御部分、また、筐体の作成や組み立てといったメカ部分、回路設計やシステム構成検討などを含む電子部分を一括で外部依頼できる企業がないか探されていました。
導入後の活用例
要求仕様を満たした不整地走行機構を持つモビリティロボットの試作品を開発でき、走行テストを無事開始頂きました。
もたらした効果、達成した数値
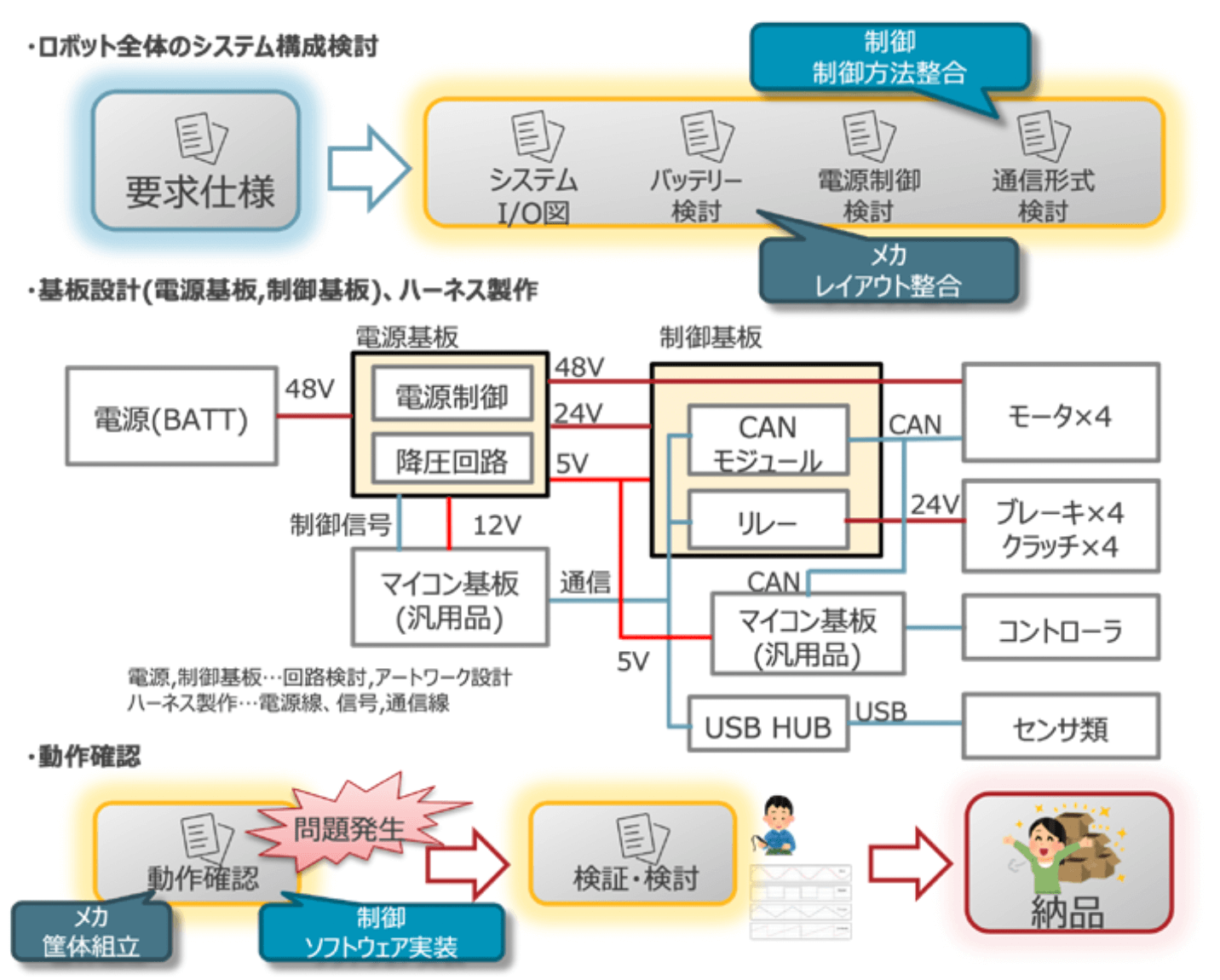
基板設計(電源基板、制御基板)からシステム構成、ハーネス製作までワンストップで対応させて頂きました。メカ筐体の組み立てや制御ソフトウェアの実装後に検証・検討を行った結果、制御方法やメカレイアウトなど、当初は想定していなかった問題もすみやかに解決することができ、大変ご評価いただきました。
この記事をシェアする
関連サービス
