ニュース
パーソルクロステクノロジーに関するニュースについて紹介します。
~ロボット開発は「コードを書く」から「AIを育てる」へ変わった~

2025年12月7日、茨城県つくば市。 最低気温が氷点下に迫る冬の澄んだ空気の中、筑波大学 制御ロボティクス研究室(伊達研究室)のチームリーダー、外山 淳也さんは、ゴール地点で安堵とも歓喜ともつかない深い溜息をついた。彼が率いる「チームケルベロス(Team Kerberos)」の自律移動ロボットが、つくば市内の遊歩道などの市街地約2.5kmを走り抜け、ミッションをクリアして戻ってきた瞬間だった。
「つくばチャレンジ2025※1」には、全国から99台のロボットがエントリーした。しかし、街なかのリアルな環境は容赦がない。ある機体は風に揺れる草に阻まれ、ある機体は冬の低い太陽による逆光でカメラ画像が白飛びし、リタイアしていった。 結果、完走できたのはわずか7チーム。さらに、信号認識や配送といった高難易度の選択課題まで含めてクリアする「課題達成」を成し遂げたのは、チームケルベロスただ一つだった。
※1 つくばチャレンジ:大学研究室、研究機関、企業、個人、学生・社会人サークルなどから毎年50以上のチームが参加。2007年から実施されている本チャレンジでは、さまざまな研究者が自律移動ロボットを市街地で走行させる技術実験を行う。結果と経験を共有することで技術レベルをあげることを目的としているため、順位付けなどを行わないのが特長。
 「つくば市長賞」を獲得したチームケルベロスの自律走行ロボット
「つくば市長賞」を獲得したチームケルベロスの自律走行ロボット
この圧倒的な成果の裏には、「2025年というAI技術の特異点」に翻弄されながらも、新しい開発手法を模索し続けた学生と、異分野から飛び込んだパーソルクロステクノロジーのエンジニアの泥臭い共闘があった。
なぜ、最先端のロボットが「ただの雑草」で止まるのか
そもそも「つくばチャレンジ」とは何か。それは実験用に整備された環境ではなく、自転車が走り、草木が生い茂り、子どもたちが飛び出す「日常の街なか(リアルワールド)」にロボットを放つ実証実験だ。 ここでロボットたちは、これまで「人間なら無意識にできる判断」ができず、立ち往生することになる。
 つくばチャレンジ走行の様子。写真は2024年に参加したもの
つくばチャレンジ走行の様子。写真は2024年に参加したもの
制御ロボティクス研究室所属、チームリーダーの外山さんは、前年の本走行で味わった「ある敗北」を詳細に語ってくれた。「昨年、僕たちのロボットは完走できる能力があったのに、『真面目すぎて』リタイアしました。狭い路地で、前を走っていた他チームのロボットが故障で止まっていたんです。人間なら『あ、故障かな?』と察して避けますよね。でも、僕らのロボットは『停止車両の後ろでは安全のため待機する』というプログラムされたルールを律儀に守り、3分間ひたすら待ち続けました。その結果、ルール上のタイムオーバーで共倒れ(スタック)しました」
ルールをコードで記述する従来の手法(If-Thenルール)では、現場の「空気」が読めない。 それだけではない。ロボットの目(LiDARやカメラ)にとって、道端から少し飛び出した「柔らかい雑草」と、ぶつかればロボット自身が壊れてしまう「硬いコンクリートブロック」との区別がつかず、ただの草の前で「壁がある!」と誤認して停止してしまう。
 LiDAR(Light Detection And Ranging:写真中央の円筒型のセンサー)は、レーザーを使って対象物との距離を測る技術。レーザー光が跳ね返ってくる時間を計測することで距離を出す
LiDAR(Light Detection And Ranging:写真中央の円筒型のセンサー)は、レーザーを使って対象物との距離を測る技術。レーザー光が跳ね返ってくる時間を計測することで距離を出す
さらに、2025年3月まで同研究室の教員の一人だった坪内 孝司特命教授(現在は学長特別補佐)は、「反射神経の限界」を指摘する。「例えば、時速18kmで走ってくる自転車は、1秒間で約5m進みます。ロボットのカメラが自転車を捉え、その画像を解析し、ロボットが自転車を避ける計算をしているコンマ数秒の間に、自転車はもう目の前まで来ている。計算して動くロボットは、とっさの反射神経において人間に遠く及ばないのです」
技術を積めば積むほど計算が重くなり、判断が遅れるジレンマ。 この壁を突破するには、人間のように直感的に状況を捉える新しい頭脳が必要だった。 そこに訪れたのが、2024年から2025年にかけての爆発的なAI技術の進化と、一人の異分野エンジニアの参画だった。
自動車開発のプロが直面した「地図なき荒野」
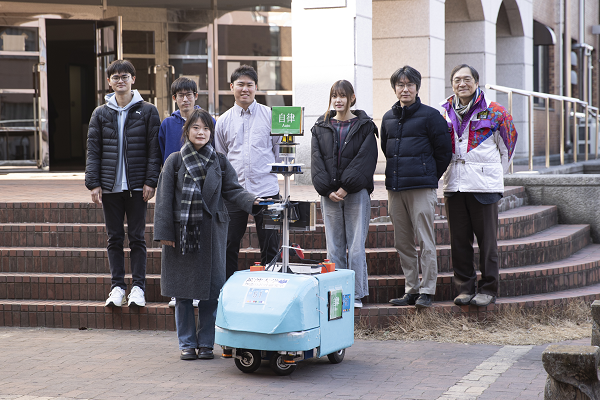 チームケルベロスのメンバーの皆さん
チームケルベロスのメンバーの皆さん
後列右から、筑波大学 学長特別補佐 先端教学推進機構長 坪内 孝司特命教授、システム情報系 伊達 央准教授、清水 美羽さん(安全管理責任)、外山 淳也さん(リーダー)、石関 隼人さん(オペレーター)、関 陽介さん(記録係)
前列はパーソルクロステクノロジーの阮 心悦
「正直、最初はめまいがするようなカルチャーショックを受けました」自律移動分野の最先端で、専門性をさらに深めるための産学連携を背景にチームに参画したパーソルクロステクノロジーのエンジニア、阮 心悦 はそう振り返る。 彼女は元々、自動車業界で「モデルベース開発(MBD)」に従事していた。MBDとは、実際の車を作る前に、コンピューター上のシミュレーションで徹底的に検証を行う手法だ。数式と理論で理想的な動きを定義し、完璧な正解を導き出してからモノを作る、いわば「計算され尽くした世界」に彼女はいた。
しかし、リアルワールドでの運用を前提とした自律移動ロボットの開発は勝手が違う。「MBDの世界とは真逆でした。現場では、風が吹けばセンサーのノイズが変わり、太陽の角度一つでカメラが何も見えなくなる。理論通りにいかない『不確実性』との戦いです」(阮)
さらに彼女を驚かせたのは、技術サイクルの速さだ。「2025年度はAI技術が爆発的に発展した一年でした。ロボット分野への活用という観点から、生成AIに関するさまざまな技術を学び、実際に試してきました。世の中の多くの技術者が感じているのと同様に、この一年間の生成AIの進展スピードには大きな驚きを感じました。特に、生成AIそのものの進展だけでなく、それを取り巻く応用技術の進化の速さにも驚かされました。数年単位のサイクルではなく、数週間単位で正解が変わるスピード感に、必死で食らいつく毎日でした」
チームケルベロスが今回取り組んだのは、実環境ですぐに必要なデータを取得するのが難しい場面に対して、既存のデータをもとにAIを活用して学習データを補完するというアプローチだ。ここで直面したのは、「どうプログラムを書くか」だけでなく、「どう適切なデータを用意するか」という課題だった。
コードを書くのではなく、世界を生成する(AI for AI)
「従来のように、実環境で必要な画像を収集する負担は軽減されました。代わりに、想定される状況をどのようにデータとして整備し、AIに学習させるかという点が重要になっています」(外山)
例えば、ロボットの目となる画像による物体認識に深層学習モデルを組み込んだAIともいえるYOLOに、つくばの街に見える、少しでも危険を伴いそうな場所を景色として全て教えなければならない。しかし、現実世界で何千時間走行しても、あらゆる危険シーンには出会えない。 そこで阮は、MBD経験者らしい合理的なアプローチに出た。最新の「生成AI(Generative AI)」によるデータ量産だ。
「手作業でデータを集めるには限界があります。そこで、生成AIを使って『ありそうな道路状況』の画像を人工的に作り出し、それをYOLOに学習させました。例えば、車両検出精度向上のための車両色の変更、天候や光条件への対応力向上のための逆光シーンの追加、さらに実データが少ない自転車やバイクのシーンの生成などです。現実には撮れていないパターンの画像をAIに作らせて、それを教材にしました」(阮)
「AIを使って、AIを育てる」――。 真面目に外を走り回るだけでなく、シミュレーションや生成技術を使って効率的に賢くする。2024年にはまだ実験的だったこの手法(Synthetic Data活用)を、阮は「使えるものは何でも使う」というエンジニアらしい判断で実戦投入した。これにより、チームは限られた時間の中でYOLOの認識性能をさらに向上させることができた。
密に意見を交わしながら、試行錯誤を重ねた
AIの進化により、開発の選択肢は大きく広がった。一方で、どの手法をどのように適用するのが最適かを見極める難しさも増している。 そんな中で、阮とリーダーの外山さんの関係も、最初から順風満帆だったわけではない。
「1年目は、周りから『あの二人、たまに言い合っているけど大丈夫?』と心配されるくらい議論しました(笑)。でも、それは仲が悪いわけじゃなくて、ロボットが思い通りに動かない時に、どうすれば解決できるかをお互いに必死でぶつけ合っていたんです」(阮)
当時、外山さんは「自分で全部コードを書きたい」という職人肌のエンジニアだった。しかし、多国籍な留学生が増え、技術が複雑化する中で、個人の力だけでは限界が見え始めていた。 外山さんは当時の苦悩をこう振り返る。「各メンバーがそれぞれの担当部分だけを書いていると、それぞれが独自の書き方になってしまい、最終的にロボットに統合できなくなるんです。自分が各要素の橋渡しをしないと、チームとして機能しなくなると気づきました。だから、あえて個々の実装に深く入りすぎず、人に任せるための『インターフェース(設計図)』を整備することに注力しようと決めました」(外山)
このチームの転換期に大きく貢献したのが、阮の「コミュニケーション能力」と「行動力」だった。 阮は、英語と日本語を駆使し、多国籍なメンバーの間に立って、それぞれが抱える課題を引き出し、解決へとつなげていった。「外山さんがプログラム全体の調整に集中できるように、私は留学生たちの進捗を見たり、実装の細かな課題を一つずつ解消したりと、チーム全体が円滑に進むように動いていました」(阮)
「阮さんは学生たちと歳は近いですが、やはり社会人としてさまざまな経験を積んでいるので、新しいことに手を付ける早さなどが学生とは異なっていました。学生のお手本として、学生をけん引するような立場になってくれました」と研究室の伊達 央准教授は振り返る。
また坪内特命教授は、この変化をこう評する。「企業の方は、やはりコードにコメントを残したり、後で使えるように整理したりする文化を持っています。学生はどうしても『動けばいい』になりがち。阮さんが入ったことで、自然とチームに『継続性のある開発』の空気が生まれたのは大きいですね」
企業の規律と、学生の爆発力。二つが噛み合った時、チームケルベロスは「唯一の課題達成」という高みへ到達した。
「失敗の引き出し」こそが、AI時代のエンジニアの財産
坪内特命教授は、この産学連携の意義について、独自の「引き出し理論」で説明する。
「エンジニアにとって大事なのは、成功も失敗も思い通りいかなかったことも、それらが詰まった『引き出し』の数です。一つの引き出しが開くと、それに関連する他の引き出しも連動して開く。阮さんはこの1年、ロボットが思い通りに動かない経験を山ほどしました。 今の日本の開発現場は、失敗を恐れて『正解』ばかり求めがちかもしれません。しかし、AI全盛の不確実な未来では、正解なんて誰も知りません。だからこそ、現場で泥にまみれて『こうやったらうまくいかない』『その根本原因はこれだ』というような経験と知識の引き出しを沢山持っている人間が、困難な状況に直面してもそこから良き解にたどりつける、誰からも頼りにされる強いエンジニアになるんです。AIもそういう解の候補を出してくれる頼もしい相棒になるかもしれませんが、AIの出した解が確かに良さそうだと、と思える直感や決断も自分のもつ経験の詰まった『引き出し』があってこそですよね」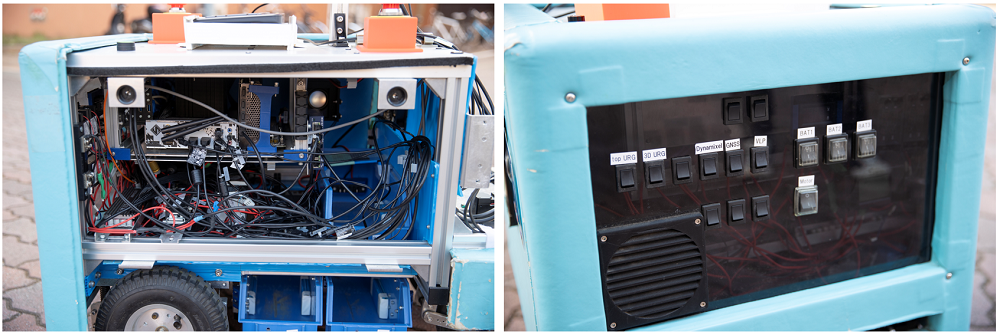
本番直前まで故障が続いたというロボット。「本番完走できたのが奇跡かもしれない」と話す学生も
ただ労働力を提供するだけの派遣ではない。社員自身が大学という「実験場」で学生と共に悩み、失敗し、その経験を会社に持ち帰る。この「共創」をひとつの答えとして、これからも大学と共に新しい答えを創造していく。
「未来は誰にもわからない」からこそ面白い
見事、つくば市長賞を受賞したチームケルベロス。しかし、彼らは「これで完成」とは微塵も思っていない。 インタビューの最後、阮さんと外山さんは口を揃えて「来年はどうなるかわからない」と笑った。
「ここ一年ほどで、自らコードを書き、エラー修正まで行うReAct Loop型のAIエージェントが大きく進展しました。これにより、エンジニアはコードを書く作業そのものから徐々に解放され、より上位のシステム構築や設計に専念できるようになりつつあります。それくらい、2025年の変化は劇的でした。だからこそ、一つの技術に固執せず、常に新しい波を乗りこなすエンジニアであり続けたいです」(阮)
「AIの活用は広がりつつありますが、ロボットへの適用においては、用途や環境に応じた設計が依然として重要です。また、『AIと人間がどう共存するか』という点については、今後も検討が必要なテーマだと感じています」(外山)
2025年、ロボット開発の現場は変わった。 コードを書く量は減ったかもしれない。しかし、未知のテクノロジーを前にして、悩み、衝突し、それでも前へ進もうとする人間たちの「熱量」だけは、変わることがない。 パーソルクロステクノロジーは、これからも柔軟な技術力で、激変する未来の最前線に立ち続ける。
●筑波大学 知能ロボット研究室
https://www.roboken.iit.tsukuba.ac.jp/
この記事をシェアする